
DexROV on tour
Since the project’s conception DexROV partners have attending outreach events worldwide to promote our ideas, progress and research. Today we offer you a recap of where we’ve been and…
Since the project’s conception DexROV partners have attending outreach events worldwide to promote our ideas, progress and research. Today we offer you a recap of where we’ve been and…
Testing new hardware and software systems is a high-stake activity. This is doubly true for systems at sea. If you test a robot at a depth of 1000 metres…
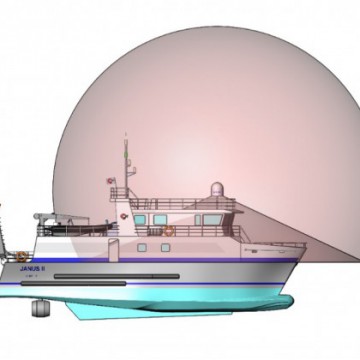
To prepare for the first DexROV integration and testing activities in Marseille this month SPACEAPPS is working with COMEX and Omniaccess to establish the satellite components for the link…

DexROV partner Idiap Research Institute has had their paper selected among award finalists at the IEEE International Conference on Robotics and Automation in Stockholm this month. The paper focused…
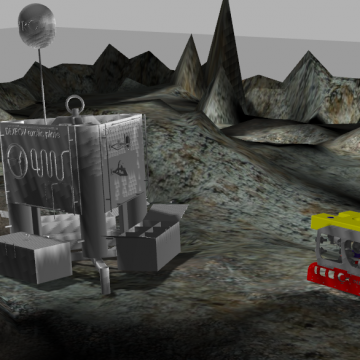
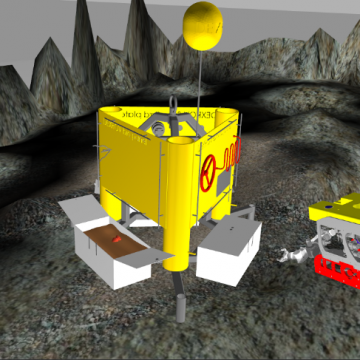
Jacobs University Bremen is responsible for the simulation environment, which was delivered at M12, and the underwater perception system, which has passed the design phase. They hosted the consortium’s…
ISME are responsible for the development of the controller that will enable autonomous capabilities for the DexROV system. The controller will coordinate multiple tasks together, while discerning and prioritising…
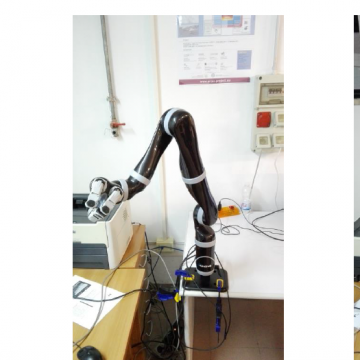
In the last year, the Idiap DexROV team has investigated approaches for skill primitive representation, including recognition and generation capabilities. They have built a working example of a teleoperation…
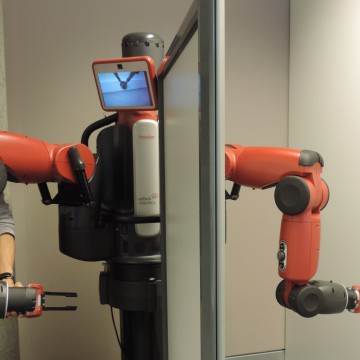
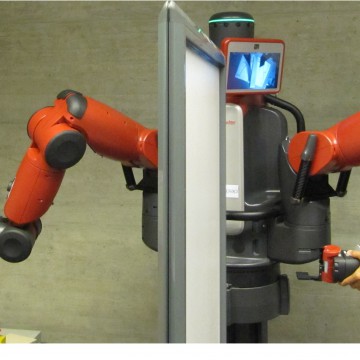
Baxter, a two-armed manufacturing robot, is helping our consortium partner Idiap’s team solve challenges by standing in for the DexROV dexterous arm during testing and development. Baxter is normally…