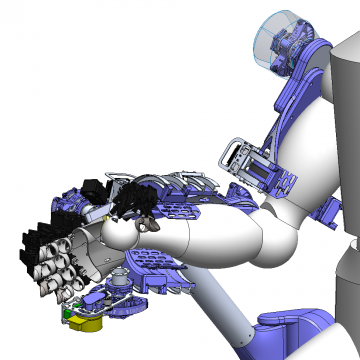
Clever design: modular approach for DexROV’s exoskeleton
One of the goals of the DexROV project is to integrate fine, dexterous control of an ROV arm – from land. Space Applications Services (SPACEAPPS) in Belgium are the…
One of the goals of the DexROV project is to integrate fine, dexterous control of an ROV arm – from land. Space Applications Services (SPACEAPPS) in Belgium are the…
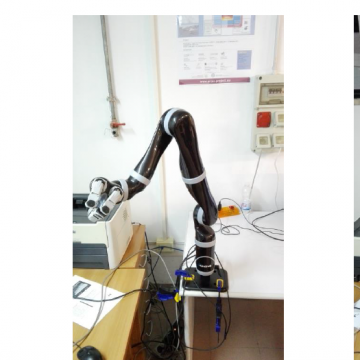
ISME are responsible for the development of the controller that will enable autonomous capabilities for the DexROV system. The controller will coordinate multiple tasks together, while discerning and prioritising…
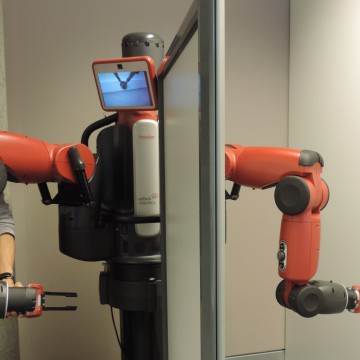
Baxter, a two-armed manufacturing robot, is helping our consortium partner Idiap’s team solve challenges by standing in for the DexROV dexterous arm during testing and development. Baxter is normally…