DexROV at Oceanology International – Don’t miss a single word
DexROV will be available for you to see in person at the Oceanology International conference in London from 13 – 15 March. Key DexROV experts will also give presentations…
DexROV will be available for you to see in person at the Oceanology International conference in London from 13 – 15 March. Key DexROV experts will also give presentations…

Since the project’s conception DexROV partners have attending outreach events worldwide to promote our ideas, progress and research. Today we offer you a recap of where we’ve been and…
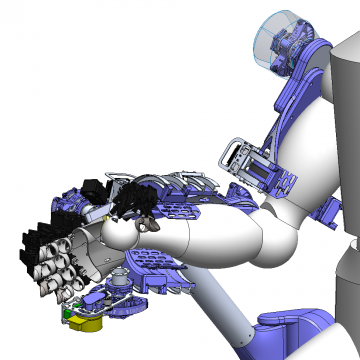
One of the goals of the DexROV project is to integrate fine, dexterous control of an ROV arm – from land. Space Applications Services (SPACEAPPS) in Belgium are the…
Testing new hardware and software systems is a high-stake activity. This is doubly true for systems at sea. If you test a robot at a depth of 1000 metres…

On 13-17 June, the DexROV consortium conducted the first testing and integration trial for DexROV. Each partner’s elements were assembled on the DexROV framework and the software systems were…
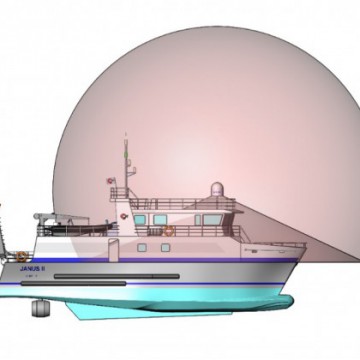
To prepare for the first DexROV integration and testing activities in Marseille this month SPACEAPPS is working with COMEX and Omniaccess to establish the satellite components for the link…
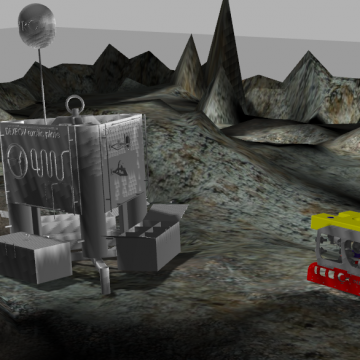
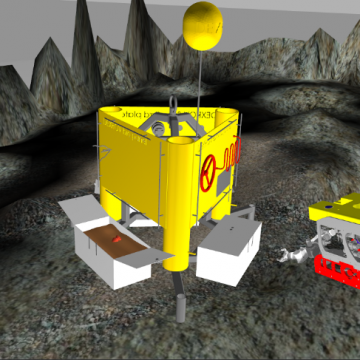
Jacobs University Bremen is responsible for the simulation environment, which was delivered at M12, and the underwater perception system, which has passed the design phase. They hosted the consortium’s…

As Coordinator of DexROV, SPACEAPPS had an active role in organizing early project activities during the first 12 months of the project – including contractual aspects as well as…
ISME are responsible for the development of the controller that will enable autonomous capabilities for the DexROV system. The controller will coordinate multiple tasks together, while discerning and prioritising…
In the last year, the Idiap DexROV team has investigated approaches for skill primitive representation, including recognition and generation capabilities. They have built a working example of a teleoperation…