As Coordinator of DexROV, SPACEAPPS had an active role in organizing early project activities during the first 12 months of the project – including contractual aspects as well as scientific and technical duties – e.g. supervising the collection of user requirements through interactions with relevant end users, defining use cases, leading the elicitation of system requirements, organizing collocated meetings with project partners, and other related activities.
Furthermore, SPACEAPPS explored suitable options for the development of the control center infrastructure as required for DexROV. This facility has been assembled and is hosted in SPACEAPPS premises in Belgium. It includes main features required to safely and effectively control the remote subsea robot (aka. ROV).
SPACEAPPS also work on the software side, performing a series of tests and trade-offs with state of the art tools for physics and haptic simulation in virtual reality environments. Due to important delays in communications between on-shore and off-shore control centers, novel paradigms are indeed required in the control center to provide users with an accurate depiction of what the ROV is experiencing thousands of kilometers away.
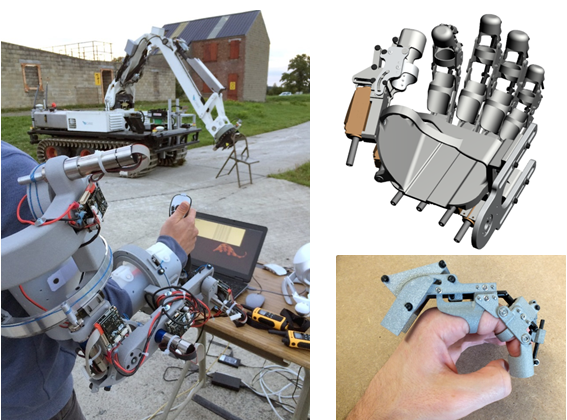
Finally, SPACEAPPS started identifying the most critical factors for the development of a custom force feedback exoskeleton interface for user’s arms and hands. This user interface will be installed at the on-shore control center and is an important piece of the DexROV concept. As a starting point, SPACEAPPS is leveraging the expertise gained in a previous project with a prototype of a lightweight force feedback exoskeleton arm.