Partner Snapshot: JACOBS at M12
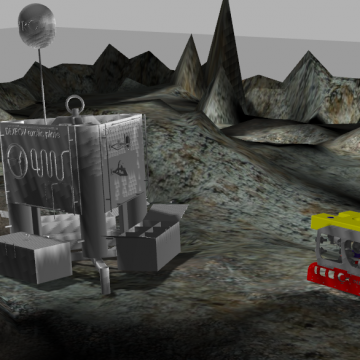
Jacobs University Bremen is responsible for the simulation environment, which was delivered at M12, and the underwater perception system, which has passed the design phase. They hosted the consortium’s…
Jacobs University Bremen is responsible for the simulation environment, which was delivered at M12, and the underwater perception system, which has passed the design phase. They hosted the consortium’s…

As Coordinator of DexROV, SPACEAPPS had an active role in organizing early project activities during the first 12 months of the project – including contractual aspects as well as…
ISME are responsible for the development of the controller that will enable autonomous capabilities for the DexROV system. The controller will coordinate multiple tasks together, while discerning and prioritising…
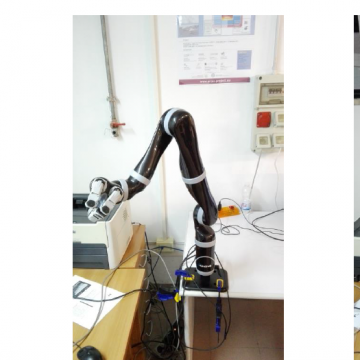
In the last year, the Idiap DexROV team has investigated approaches for skill primitive representation, including recognition and generation capabilities. They have built a working example of a teleoperation…

By Jeremi Gancett, Project Coordinator for Space Application Services One year in, DexROV is well on track, and partners have already successfully achieved the first milestones of the project.…

Twenty-five representative members of the DexROV consortium met in Brussels on 7 to 8 September for the six-month progress meeting. SpaceApps hosted the meeting, which focused on reporting each…
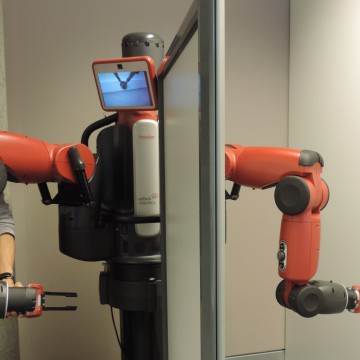
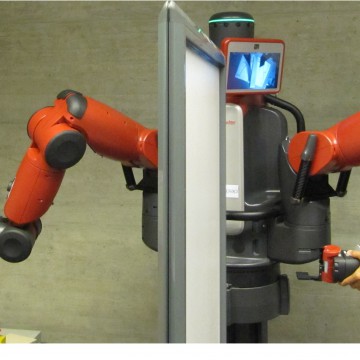
Baxter, a two-armed manufacturing robot, is helping our consortium partner Idiap’s team solve challenges by standing in for the DexROV dexterous arm during testing and development. Baxter is normally…

Representatives from countries and institutions all over Europe gathered in Marseille, France, in March this year to meet each other for the first time. This remarkable group intends to do…